The GAMPL Procedure
-
Overview

- Getting Started
-
Syntax
-
DetailsMissing ValuesThin-Plate Regression SplinesGeneralized Additive ModelsModel Evaluation CriteriaFitting AlgorithmsDegrees of FreedomModel InferenceDispersion ParameterTests for Smoothing ComponentsComputational Method: MultithreadingChoosing an Optimization TechniqueDisplayed OutputODS Table NamesODS Graphics
-
Examples
- References
Example 7.1 Scatter Plot Smoothing
This example shows how you can use PROC GAMPL to perform scatter plot smoothing.
The example uses the LIDAR data set (Ruppert, Wand, and Carroll 2003). This data set is used in many books and journals to illustrate different smoothing techniques. Scientists use a technique
known as LIDAR (light detection and ranging), which uses laser reflections to detect chemical compounds in the atmosphere.
The following DATA step creates the data set Lidar:
title 'Scatter Plot Smoothing'; data Lidar; input Range LogRatio @@; datalines; 390 -0.05035573 391 -0.06009706 393 -0.04190091 394 -0.0509847 396 -0.05991345 397 -0.02842392 399 -0.05958421 400 -0.03988881 402 -0.02939582 403 -0.03949445 405 -0.04764749 406 -0.06038 408 -0.03123034 409 -0.03816584 411 -0.07562269 412 -0.05001751 414 -0.0457295 415 -0.07766966 417 -0.02460641 418 -0.07133184 ... more lines ... 702 -0.4716702 703 -0.7801088 705 -0.6668431 706 -0.5783479 708 -0.7874522 709 -0.6156956 711 -0.8967602 712 -0.7077379 714 -0.672567 715 -0.6218413 717 -0.8657611 718 -0.557754 720 -0.8026684 ;
In this data set, Range records the distance that light travels before it is reflected back to the source. LogRatio is the logarithm of the ratio of light that is received from two laser sources. The objective is to use scatter plot smoothing
to discover the nonlinear pattern in the data set. SAS provides different methods (for example local regression) for scatter
plot smoothing. You can perform scatter plot smoothing by using the SGPLOT procedure, as shown in the following statements:
proc sgplot data=Lidar; scatter x=Range y=LogRatio; loess x=Range y=LogRatio / nomarkers; pbspline x=Range y=LogRatio / nomarkers; run;
Output 7.1.1 shows the scatter plot of Range and LogRatio and the smoothing curves that are fitted by local regression and penalized B-splines smoothing techniques.
Output 7.1.1: Scatter Plot Smoothing
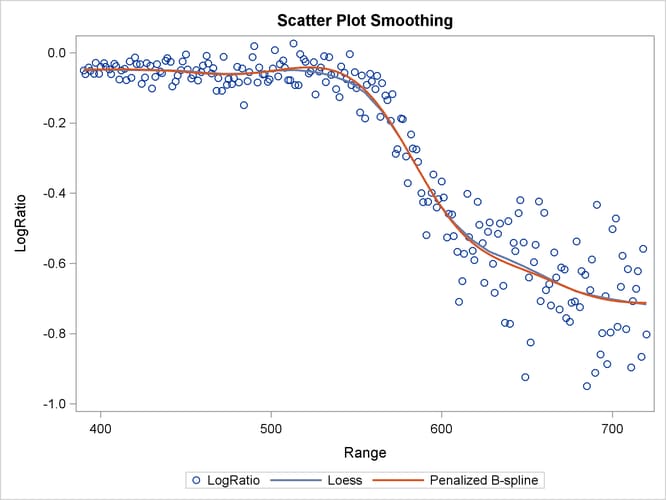
Both scatter plot smoothing techniques show a significant nonlinear structure between Range and LogRatio that cannot be easily modeled by ordinary polynomials. You can also use the GAMPL procedure to perform scatter plot smoothing
on this data set, as in the following statements:
proc gampl data=Lidar seed=12345; model LogRatio = spline(Range/details); output out=LidarOut pred=p; run;
The “Specifications for Spline(Range)” table in Output 7.1.2 displays the specifications for constructing the spline term for Range. The maximum degrees of freedom is 10, which sets the upper limit of effective degrees of freedom for the spline term to
be 9 after one degree of freedom is absorbed in the intercept. The order of the derivative in the penalty is 2, which means
the unpenalized portion of the spline term involves polynomials with degrees up to 2.
Output 7.1.2: Spline Specification
The “Fit Statistics” table in Output 7.1.3 shows the summary statistics for the fitted model.
Output 7.1.3: Fit Statistics
| Fit Statistics | |
|---|---|
| Penalized Log Likelihood | 251.44124 |
| Roughness Penalty | 0.00000426 |
| Effective Degrees of Freedom | 9.99988 |
| Effective Degrees of Freedom for Error | 211.00000 |
| AIC (smaller is better) | -482.88271 |
| AICC (smaller is better) | -481.83512 |
| BIC (smaller is better) | -448.90148 |
| GCV (smaller is better) | 0.00654 |
The “Estimates for Smoothing Components” table in Output 7.1.4 shows that the effective degrees of freedom for the spline term of Range is approximately 8 after the GCV criterion is optimized with respect to the smoothing parameter. The roughness penalty is
small, suggesting that there is an important contribution from the penalized part of thin-plate regression splines beyond
nonpenalized polynomials.
Output 7.1.4: Estimates for Smoothing Components
Because the optimal model is obtained by searching in a functional space that is constrained by the maximum degrees of freedom for a spline term, you might wonder whether PROC GAMPL produces a much different model if you increase the value. The following statements fit another model in which the maximum degrees of freedom is increased to 20:
proc gampl data=Lidar seed=12345; model LogRatio = spline(Range/maxdf=20); output out=LidarOut2 pred=p2; run;
Output 7.1.5 displays fit summary statistics for the second model. The model fit statistics from the second model are very close to the ones from the first model, indicating that the second model is not much different from the first model.
Output 7.1.5: Fit Statistics
| Scatter Plot Smoothing |
| Fit Statistics | |
|---|---|
| Penalized Log Likelihood | 250.95136 |
| Roughness Penalty | 0.06254 |
| Effective Degrees of Freedom | 10.04384 |
| Effective Degrees of Freedom for Error | 209.03211 |
| AIC (smaller is better) | -481.87757 |
| AICC (smaller is better) | -480.82094 |
| BIC (smaller is better) | -447.74696 |
| GCV (smaller is better) | 0.00657 |
Output 7.1.6 shows that the effective degrees of freedom for the spline term of Range is slightly larger than 8, which is understandable because increasing the maximum degrees of freedom expands the functional
space for model searching. Functions in the expanded space can provide a better fit to the data, but they are also penalized
more because the roughness penalty value for the second model is much larger than the one for the first model. This suggests
that functions in the expanded space do not help much, given the nonlinear relationship between Range and LogRatio.
Output 7.1.6: Estimates for Smoothing Components
The two fitted models are all based on thin-plate regression splines, in which polynomials that have degrees higher than 2 are penalized. You might wonder whether allowing higher-order polynomials yields a much different model. The following statements fit a third spline model by penalizing polynomials that have degrees higher than 3:
proc gampl data=Lidar seed=12345; model LogRatio = spline(Range/m=3); output out=LidarOut3 pred=p3; run;
The fit summary statistics shown in Output 7.1.7 are close to the ones from the previous two models, albeit slightly smaller.
Output 7.1.7: Fit Statistics
| Scatter Plot Smoothing |
| Fit Statistics | |
|---|---|
| Penalized Log Likelihood | 249.79779 |
| Roughness Penalty | 9.440383E-9 |
| Effective Degrees of Freedom | 10.00000 |
| Effective Degrees of Freedom for Error | 211.00000 |
| AIC (smaller is better) | -479.59559 |
| AICC (smaller is better) | -478.54797 |
| BIC (smaller is better) | -445.61397 |
| GCV (smaller is better) | 0.00664 |
As shown in Output 7.1.8, the effective degrees of freedom for the spline term where polynomials with degrees less than 4 are allowed without penalization is 8. The roughness penalty is quite small compared to the previous two fits. This also suggests that there are important contributions from the penalized part of the thin-plate regression splines even after the nonpenalized polynomials are raised to order 3.
Output 7.1.8: Estimates for Smoothing Components
The following statements use the DATA step to merge the predictions from the three scatter plot smoothing fits by PROC GAMPL and use the SGPLOT procedure to visualize them:
data LidarPred;
merge Lidar LidarOut LidarOut2 LidarOut3;
run;
proc sgplot data=LidarPred;
scatter x=Range y=LogRatio / markerattrs=GraphData1(size=7);
series x=Range y=p / lineattrs =GraphData2(thickness=2)
legendlabel="Spline 1";
series x=Range y=p2 / lineattrs =GraphData3(thickness=2)
legendlabel="Spline 2";
series x=Range y=p3 / lineattrs =GraphData4(thickness=2)
legendlabel="Spline 3";
run;
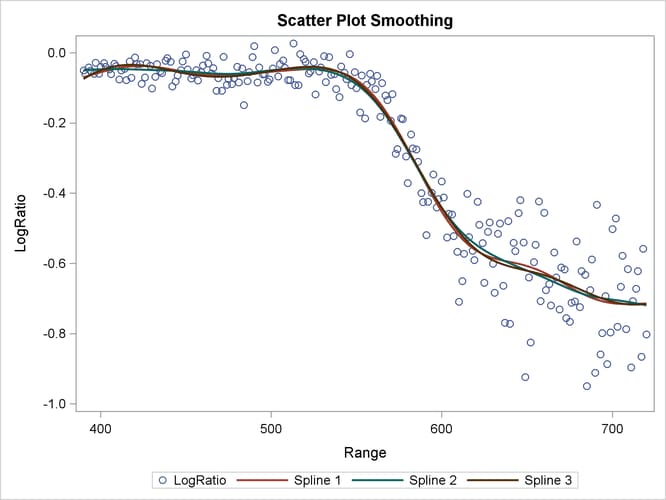
Output 7.1.9 displays the scatter plot smoothing fits by PROC GAMPL under three different spline specifications.
Output 7.1.9: Scatter Plot Smoothing