The GAMPL Procedure
-
Overview

- Getting Started
-
Syntax
-
DetailsMissing ValuesThin-Plate Regression SplinesGeneralized Additive ModelsModel Evaluation CriteriaFitting AlgorithmsDegrees of FreedomModel InferenceDispersion ParameterTests for Smoothing ComponentsComputational Method: MultithreadingChoosing an Optimization TechniqueDisplayed OutputODS Table NamesODS Graphics
-
Examples
- References
Model Evaluation Criteria
Given a fixed set of smoothing parameters  in which each
in which each  controls the smoothness of each spline term, you can fit a generalized additive model by the penalized likelihood estimation.
There are infinitely many sets of smoothing parameters. In order to search optimum models, some model evaluation criteria
need to be defined to quantify the model goodness-of-fit. The GAMPL procedure uses the following model evaluation criteria:
controls the smoothness of each spline term, you can fit a generalized additive model by the penalized likelihood estimation.
There are infinitely many sets of smoothing parameters. In order to search optimum models, some model evaluation criteria
need to be defined to quantify the model goodness-of-fit. The GAMPL procedure uses the following model evaluation criteria:



Consider the optimization problem
![\[ \min (\mb{y}-\bX \bbeta )’(\mb{y}-\bX \bbeta )+\bbeta ’\bS _{\blambda }\bbeta \quad \text {with respect to}\quad \bbeta \]](images/stathpug_hpgam0158.png)
The parameter estimate for  can be represented as
can be represented as
![\[ \hat{\bbeta } = (\bX ’\bX +\bS _{\blambda })^{-1}\bX ’\mb{y} \]](images/stathpug_hpgam0159.png)
And the smoothing matrix (also called the influence matrix or hat matrix) is thus represented as
![\[ \bH _{\blambda } = \bX (\bX ’\bX +\bS _{\blambda })^{-1}\bX ’ \]](images/stathpug_hpgam0160.png)
With the defined smoothing matrix, you can form the model evaluation criteria as follows:
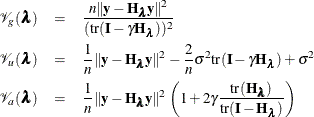
In the equations,  (which corresponds to the GAMMA= suboption of the CRITERION=
option) is the tuning parameter that is sometimes used to enforce smoother models.
(which corresponds to the GAMMA= suboption of the CRITERION=
option) is the tuning parameter that is sometimes used to enforce smoother models.
The GAMPL procedure uses fitting algorithms that involve minimizing the model evaluation criterion with respect to unknown
smoothing parameters .