The MCMC Procedure
-
Overview

-
Getting Started
-
Syntax
-
DetailsHow PROC MCMC WorksBlocking of ParametersSampling MethodsTuning the Proposal DistributionDirect SamplingConjugate SamplingInitial Values of the Markov ChainsAssignments of ParametersStandard DistributionsUsage of Multivariate DistributionsSpecifying a New DistributionUsing Density Functions in the Programming StatementsTruncation and CensoringSome Useful SAS FunctionsMatrix Functions in PROC MCMCCreate Design MatrixModeling Joint LikelihoodAccess Lag and Lead VariablesCALL ODE and CALL QUAD SubroutinesRegenerating Diagnostics PlotsCaterpillar PlotAutocall Macros for PostprocessingGamma and Inverse-Gamma DistributionsPosterior Predictive DistributionHandling of Missing DataFunctions of Random-Effects ParametersFloating Point Errors and OverflowsHandling Error MessagesComputational ResourcesDisplayed OutputODS Table NamesODS Graphics
-
ExamplesSimulating Samples From a Known DensityBox-Cox TransformationLogistic Regression Model with a Diffuse PriorLogistic Regression Model with Jeffreys’ PriorPoisson RegressionNonlinear Poisson Regression ModelsLogistic Regression Random-Effects ModelNonlinear Poisson Regression Multilevel Random-Effects ModelMultivariate Normal Random-Effects ModelMissing at Random AnalysisNonignorably Missing Data (MNAR) AnalysisChange Point ModelsExponential and Weibull Survival AnalysisTime Independent Cox ModelTime Dependent Cox ModelPiecewise Exponential Frailty ModelNormal Regression with Interval CensoringConstrained AnalysisImplement a New Sampling AlgorithmUsing a Transformation to Improve MixingGelman-Rubin DiagnosticsOne-Compartment Model with Pharmacokinetic Data
- References
Example 73.2 Box-Cox Transformation
Box-Cox transformations (Box and Cox 1964) are often used to find a power transformation of a dependent variable to ensure the normality assumption in a linear regression
model. This example illustrates how you can use PROC MCMC to estimate a Box-Cox transformation for a linear regression model.
Two different priors on the transformation parameter  are considered: a continuous prior and a discrete prior. You can estimate the probability of being 0 with a discrete prior but not with a continuous prior. The IF-ELSE statements are demonstrated in the example.
are considered: a continuous prior and a discrete prior. You can estimate the probability of being 0 with a discrete prior but not with a continuous prior. The IF-ELSE statements are demonstrated in the example.
Using a Continuous Prior on
The following statements create a SAS data set with measurements of y (the response variable) and x (a single dependent variable):
title 'Box-Cox Transformation, with a Continuous Prior on Lambda'; data boxcox; input y x @@; datalines; 10.0 3.0 72.6 8.3 59.7 8.1 20.1 4.8 90.1 9.8 1.1 0.9 78.2 8.5 87.4 9.0 9.5 3.4 0.1 1.4 0.1 1.1 42.5 5.1 57.0 7.5 9.9 1.9 0.5 1.0 121.1 9.9 37.5 5.9 49.5 6.7 ... more lines ... 2.6 1.8 58.6 7.9 81.2 8.1 37.2 6.9 ;
The Box-Cox transformation of y takes on the form of:
![\[ y(\lambda ) = \left\{ \begin{array}{ll} \frac{y^\lambda - 1}{\lambda } & \mbox{if} \; \; \lambda \neq 0; \\ \log (y) & \mbox{if} \; \; \lambda = 0. \end{array} \right. \]](images/statug_mcmc0610.png)
The transformed response  is assumed to be normally distributed:
is assumed to be normally distributed:
![\[ y_ i(\lambda ) \sim \mbox{normal}(\beta _0 + \beta _1 x_ i, \sigma ^2) \]](images/statug_mcmc0612.png)
The likelihood with respect to the original response  is as follows:
is as follows:
![\[ p(y_ i | \lambda , \beta , \sigma ^2, x_ i) \propto \phi (y_ i | \beta _0 + \beta _1 x_ i, \sigma ^2) \cdot J(\lambda , y_ i) \]](images/statug_mcmc0613.png)
where  is the Jacobian:
is the Jacobian:
![\[ J(\lambda , y) = \left\{ \begin{array}{ll} y_ i^{\lambda -1} & \mbox{if} \; \; \lambda \neq 0; \\ 1/y_ i & \mbox{if} \; \; \lambda = 0. \end{array} \right. \]](images/statug_mcmc0615.png)
And on the log-scale, the Jacobian becomes:
![\[ \log (J(\lambda , y)) = \left\{ \begin{array}{ll} (\lambda - 1) \cdot \log (y_ i) & \mbox{if} \; \; \lambda \neq 0; \\ -\log (y_ i) & \mbox{if} \; \; \lambda = 0. \end{array} \right. \]](images/statug_mcmc0616.png)
There are four model parameters:  and
and  . You can considering using a flat prior on
. You can considering using a flat prior on  and a gamma prior on .
and a gamma prior on .
To consider only power transformations ( ), you can use a continuous prior (for example, a uniform prior from –2 to 2) on . One issue with using a continuous prior is that you cannot estimate the probability of
), you can use a continuous prior (for example, a uniform prior from –2 to 2) on . One issue with using a continuous prior is that you cannot estimate the probability of  . To do so, you need to consider a discrete prior that places positive probability mass on the point 0. See Modeling lambda=0.
. To do so, you need to consider a discrete prior that places positive probability mass on the point 0. See Modeling lambda=0.
The following statements fit a Box-Cox transformation model:
ods graphics on;
proc mcmc data=boxcox nmc=50000 propcov=quanew seed=12567
monitor=(lda);
ods select PostSumInt TADpanel;
parms beta0 0 beta1 0 lda 1 s2 1;
beginnodata;
prior beta: ~ general(0);
prior s2 ~ gamma(shape=3, scale=2);
prior lda ~ unif(-2,2);
sd = sqrt(s2);
endnodata;
ys = (y**lda-1)/lda;
mu = beta0+beta1*x;
ll = (lda-1)*log(y)+lpdfnorm(ys, mu, sd);
model general(ll);
run;
The PROPCOV=
option initializes the Markov chain at the posterior mode and uses the estimated inverse Hessian matrix as the initial proposal
covariance matrix. The MONITOR=
option selects as the variable to report. The ODS SELECT statement displays the summary statistics table, the interval statistics table,
and the diagnostic plots.
The PARMS
statement puts all four parameters,  ,
,  , , and , in a single block and assigns initial values to each of them. Three PRIOR
statements specify previously stated prior distributions for these parameters. The assignment to
, , and , in a single block and assigns initial values to each of them. Three PRIOR
statements specify previously stated prior distributions for these parameters. The assignment to sd transforms a variance to a standard deviation. It is better to place the transformation inside the BEGINNODATA
and ENDNODATA
statements to save computational time.
The assignment to the symbol ys evaluates the Box-Cox transformation of y, where mu is the regression mean and ll is the log likelihood of the transformed variable ys. Note that the log of the Jacobian term is included in the calculation of ll.
Summary statistics and interval statistics for lda are listed in Output 73.2.1.
Output 73.2.1: Box-Cox Transformation
The posterior mean of is 0.47, with a 95% equal-tail interval of ![$[0.42, 0.53]$](images/statug_mcmc0621.png) and a similar HPD interval. The preferred power transformation would be 0.5 (rounding up to the square root transformation).
and a similar HPD interval. The preferred power transformation would be 0.5 (rounding up to the square root transformation).
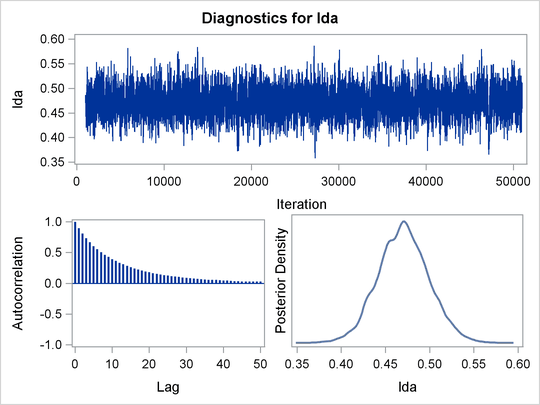
Output 73.2.2 shows diagnostics plots for lda. The chain appears to converge, and you can proceed to make inferences. The density plot shows that the posterior density
is relatively symmetric around its mean estimate.
Output 73.2.2: Diagnostic Plots for
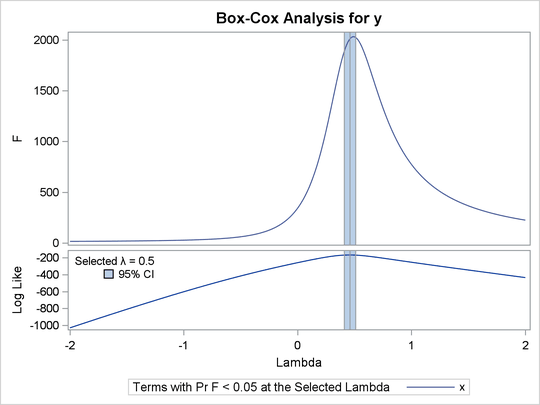
To verify the results, you can use PROC TRANSREG (see Chapter 117: The TRANSREG Procedure) to find the estimate of .
proc transreg data=boxcox details pbo; ods output boxcox = bc; model boxcox(y / convenient lambda=-2 to 2 by 0.01) = identity(x); output out=trans; run;
Output from PROC TRANSREG is shown in Output 73.2.5 and Output 73.2.4. PROC TRANSREG produces a similar point estimate of  , and the 95% confidence interval is shown in Output 73.2.5.
, and the 95% confidence interval is shown in Output 73.2.5.
Output 73.2.3: Box-Cox Transformation Using PROC TRANSREG
Output 73.2.4: Estimates Reported by PROC TRANSREG
| Box-Cox Transformation, with a Continuous Prior on Lambda |
| Model Statement Specification Details | ||||
|---|---|---|---|---|
| Type | DF | Variable | Description | Value |
| Dep | 1 | BoxCox(y) | Lambda Used | 0.5 |
| Lambda | 0.46 | |||
| Log Likelihood | -167.0 | |||
| Conv. Lambda | 0.5 | |||
| Conv. Lambda LL | -168.3 | |||
| CI Limit | -169.0 | |||
| Alpha | 0.05 | |||
| Options | Convenient Lambda Used | |||
| Ind | 1 | Identity(x) | DF | 1 |
The ODS data set Bc contains the 95% confidence interval estimates produced by PROC TRANSREG. This ODS table is rather large, and you want to
see only the relevant portion. The following statements generate the part of the table that is important and display Output 73.2.5:
proc print noobs label data=bc(drop=rmse); title2 'Confidence Interval'; where ci ne ' ' or abs(lambda - round(lambda, 0.5)) < 1e-6; label convenient = '00'x ci = '00'x; run;
The estimated 90% confidence interval is ![$[0.41, 0.51]$](images/statug_mcmc0623.png) , which is very close to the reported Bayesian credible intervals. The resemblance of the intervals is probably due to the
noninformative prior that you used in this analysis.
, which is very close to the reported Bayesian credible intervals. The resemblance of the intervals is probably due to the
noninformative prior that you used in this analysis.
Output 73.2.5: Estimated Confidence Interval on
| Box-Cox Transformation, with a Continuous Prior on Lambda |
| Confidence Interval |
| Dependent | Lambda | R-Square | Log Likelihood | ||
|---|---|---|---|---|---|
| BoxCox(y) | -2.00 | 0.14 | -1030.56 | ||
| BoxCox(y) | -1.50 | 0.17 | -810.50 | ||
| BoxCox(y) | -1.00 | 0.22 | -602.53 | ||
| BoxCox(y) | -0.50 | 0.39 | -415.56 | ||
| BoxCox(y) | 0.00 | 0.78 | -257.92 | ||
| BoxCox(y) | 0.41 | 0.95 | -168.40 | * | |
| BoxCox(y) | 0.42 | 0.95 | -167.86 | * | |
| BoxCox(y) | 0.43 | 0.95 | -167.46 | * | |
| BoxCox(y) | 0.44 | 0.95 | -167.19 | * | |
| BoxCox(y) | 0.45 | 0.95 | -167.05 | * | |
| BoxCox(y) | 0.46 | 0.95 | -167.04 | < | |
| BoxCox(y) | 0.47 | 0.95 | -167.16 | * | |
| BoxCox(y) | 0.48 | 0.95 | -167.41 | * | |
| BoxCox(y) | 0.49 | 0.95 | -167.79 | * | |
| BoxCox(y) | 0.50 | + | 0.95 | -168.28 | * |
| BoxCox(y) | 0.51 | 0.95 | -168.89 | * | |
| BoxCox(y) | 1.00 | 0.89 | -253.09 | ||
| BoxCox(y) | 1.50 | 0.79 | -345.35 | ||
| BoxCox(y) | 2.00 | 0.70 | -435.01 |
Modeling 
With a continuous prior on , you can get only a continuous posterior distribution, and this makes the probability of  equal to 0 by definition. To consider as a viable solution to the Box-Cox transformation, you need to use a discrete prior that places some probability mass on
the point 0 and allows for a meaningful posterior estimate of .
equal to 0 by definition. To consider as a viable solution to the Box-Cox transformation, you need to use a discrete prior that places some probability mass on
the point 0 and allows for a meaningful posterior estimate of .
This example uses a simulation study where the data are generated from an exponential likelihood. The simulation implies that
the correct transformation should be the logarithm and should be 0. Consider the following exponential model:
![\[ y = \exp (x + \epsilon ), \]](images/statug_mcmc0626.png)
where  . The transformed data can be fitted with a linear model:
. The transformed data can be fitted with a linear model:
![\[ \log (y) = x + \epsilon \]](images/statug_mcmc0628.png)
The following statements generate a SAS data set with a gridded x and corresponding y:
title 'Box-Cox Transformation, Modeling Lambda = 0';
data boxcox;
do x = 1 to 8 by 0.025;
ly = x + normal(7);
y = exp(ly);
output;
end;
run;
The log-likelihood function, after taking the Jacobian into consideration, is as follows:
![\[ \log p(y_ i | \lambda , x_ i) = \left\{ \begin{array}{ll} (\lambda - 1) \log (y_ i) - \frac{1}{2} \left( \log \sigma ^2 + \frac{\left( (y_ i^\lambda -1)/\lambda - x_ i \right)^2}{\sigma ^2} \right) + C_1 & \mbox{if} \; \; \lambda \neq 0; \\ -\log (y_ i) - \frac{1}{2}\left( \log \sigma ^2 + \frac{(\log (y_ i)-x_ i)^2}{\sigma ^2} \right) + C_2& \mbox{if} \; \; \lambda = 0. \end{array} \right. \]](images/statug_mcmc0629.png)
where  and
and  are two constants.
are two constants.
You can use the function DGENERAL
to place a discrete prior on . The function is similar to the function GENERAL
, except that it indicates a discrete distribution. For example, you can specify a discrete uniform prior from –2 to 2 using
prior lda ~ dgeneral(1, lower=-2, upper=2);
This places equal probability mass on five points, –2, –1, 0, 1, and 2. This prior might not work well here because the grid
is too coarse. To consider smaller values of , you can sample a parameter that takes a wider range of integer values and transform it back to the space. For example, set alpha as your model parameter and give it a discrete uniform prior from –200 to 200. Then define as alpha/100 so can take values between –2 and 2 but on a finer grid.
The following statements fit a Box-Cox transformation by using a discrete prior on :
proc mcmc data=boxcox outpost=simout nmc=50000 seed=12567
monitor=(lda);
ods select PostSumInt;
parms s2 1 alpha 10;
beginnodata;
prior s2 ~ gamma(shape=3, scale=2);
if alpha=0 then lp = log(2);
else lp = log(1);
prior alpha ~ dgeneral(lp, lower=-200, upper=200);
lda = alpha * 0.01;
sd = sqrt(s2);
endnodata;
if alpha=0 then
ll = -ly+lpdfnorm(ly, x, sd);
else do;
ys = (y**lda - 1)/lda;
ll = (lda-1)*ly+lpdfnorm(ys, x, sd);
end;
model general(ll);
run;
There are two parameters, s2 and alpha, in the model. They are placed in a single PARMS
statement so that they are sampled in the same block.
The parameter s2 takes a gamma distribution, and alpha takes a discrete prior. The IF-ELSE statements state that alpha takes twice as much prior density when it is 0 than otherwise. Note that on the original scale,  . Translating that to the log scale, the densities become
. Translating that to the log scale, the densities become  and
and  , respectively. The LDA assignment statement transforms
, respectively. The LDA assignment statement transforms alpha to the parameter of interest: lda takes values between –2 and 2. You can model lda on a even smaller scale by dividing alpha by a larger constant. However, an increment of 0.01 in the Box-Cox transformation is usually sufficient. The SD assignment
statement calculates the square root of the variance term.
The log-likelihood function uses another set of IF-ELSE statements, separating the case of from the others. The formulas are stated previously. The output of the program is shown in Output 73.2.6.
Output 73.2.6: Box-Cox Transformation
From the summary statistics table, you see that the point estimate for is 0 and both of the 95% equal-tail and HPD credible intervals are 0. This strongly suggests that is the best estimate for this problem. In addition, you can also count the frequency of among posterior samples to get a more precise estimate on the posterior probability of being 0.
The following statements use PROC FREQ to produce Output 73.2.7 and Output 73.2.8:
proc freq data=simout; ods select onewayfreqs freqplot; tables lda /nocum plot=freqplot(scale=percent); run; ods graphics off;
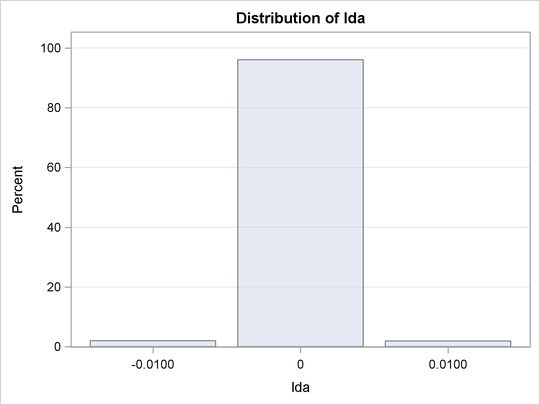
Output 73.2.7 shows the frequency count table. An estimate of  is 96%. The conclusion is that the
is 96%. The conclusion is that the  transformation should be the appropriate transformation used here, which agrees with the simulation setup. Output 73.2.8 shows the histogram of .
transformation should be the appropriate transformation used here, which agrees with the simulation setup. Output 73.2.8 shows the histogram of .
Output 73.2.7: Frequency Counts of
Output 73.2.8: Histogram of