The Linear Programming Solver
- Overview
- Getting Started
-
Syntax

-
Details
Presolve Pricing Strategies for the Primal and Dual Simplex Solvers The Network Simplex Algorithm The Interior Point Algorithm Macro Variable OROPTMODEL Iteration Log for the Primal and Dual Simplex Solvers Iteration Log for the Network Simplex Solver Iteration Log for the Interior Point Solver Problem Statistics Data Magnitude and Variable Bounds Variable and Constraint Status Irreducible Infeasible Set
-
Examples
Diet Problem Reoptimizing the Diet Problem Using BASIS=WARMSTART Two-Person Zero-Sum Game Finding an Irreducible Infeasible Set Using the Network Simplex Solver Migration to OPTMODEL: Generalized Networks Migration to OPTMODEL: Maximum Flow Migration to OPTMODEL: Production, Inventory, Distribution Migration to OPTMODEL: Shortest Path
- References
Getting Started: LP Solver
The following example illustrates how you can use the OPTMODEL procedure to solve linear programs. Suppose you want to solve the following problem:
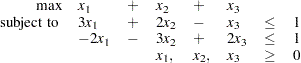 |
You can use the following statements to call the OPTMODEL procedure for solving linear programs:
proc optmodel;
var x{i in 1..3} >= 0;
max f = x[1] + x[2] + x[3];
con c1: 3*x[1] + 2*x[2] - x[3] <= 1;
con c2: -2*x[1] - 3*x[2] + 2*x[3] <= 1;
solve with lp / solver = ps presolver = none printfreq = 1;
print x;
quit;
The optimal solution and the optimal objective value are displayed in Figure 5.1.
Figure 5.1
Solution Summary
The OPTMODEL Procedure
| Problem Summary | |
|---|---|
| Objective Sense | Maximization |
| Objective Function | f |
| Objective Type | Linear |
| Number of Variables | 3 |
| Bounded Above | 0 |
| Bounded Below | 3 |
| Bounded Below and Above | 0 |
| Free | 0 |
| Fixed | 0 |
| Number of Constraints | 2 |
| Linear LE (<=) | 2 |
| Linear EQ (=) | 0 |
| Linear GE (>=) | 0 |
| Linear Range | 0 |
| Constraint Coefficients | 6 |
| Solution Summary | |
|---|---|
| Solver | Primal Simplex |
| Objective Function | f |
| Solution Status | Optimal |
| Objective Value | 8 |
| Iterations | 2 |
| Primal Infeasibility | 0 |
| Dual Infeasibility | 0 |
| Bound Infeasibility | 0 |
| [1] | x |
|---|---|
| 1 | 0 |
| 2 | 3 |
| 3 | 5 |
The iteration log displaying problem statistics, progress of the solution, and the optimal objective value is shown in Figure 5.2.
Figure 5.2
Log
| NOTE: The problem has 3 variables (0 free, 0 fixed). |
| NOTE: The problem has 2 linear constraints (2 LE, 0 EQ, 0 GE, 0 range). |
| NOTE: The problem has 6 linear constraint coefficients. |
| NOTE: The problem has 0 nonlinear constraints (0 LE, 0 EQ, 0 GE, 0 range). |
| NOTE: The OPTLP presolver value NONE is applied. |
| NOTE: The PRIMAL SIMPLEX solver is called. |
| Objective Entering Leaving |
| Phase Iteration Value Variable Variable |
| 2 1 0.500000 x[3] c2 (S) |
| 2 2 8.000000 x[2] c1 (S) |
| NOTE: Optimal. |
| NOTE: Objective = 8. |