The OPTQP Procedure

Overview: OPTQP Procedure
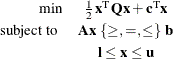
The OPTQP procedure solves quadratic programs—problems with quadratic objective function and a collection of linear constraints, including lower or upper bounds (or both) on the decision variables.
Mathematically, a quadratic programming (QP) problem can be stated as follows:
where
|
|
|
|
is the quadratic (also known as Hessian) matrix |
|
|
|
|
is the constraints matrix |
|
|
|
|
is the vector of decision variables |
|
|
|
|
is the vector of linear objective function coefficients |
|
|
|
|
is the vector of constraints right-hand sides (RHS) |
|
|
|
|
is the vector of lower bounds on the decision variables |
|
|
|
|
is the vector of upper bounds on the decision variables |









The quadratic matrix  is assumed to be symmetric; that is,
is assumed to be symmetric; that is,
![\[ q_{ij} = q_{ji},\quad \forall i,j = 1, \ldots , n \]](images/ormpug_optqp0014.png)
Indeed, it is easy to show that even if  , the simple modification
, the simple modification
![\[ \tilde{\mathbf{Q}} = \frac{1}{2}(\mathbf{Q} + \mathbf{Q}^\textrm {T}) \]](images/ormpug_optqp0016.png)
produces an equivalent formulation  hence symmetry is assumed. When you specify a quadratic matrix, it suffices to list only lower triangular coefficients.
hence symmetry is assumed. When you specify a quadratic matrix, it suffices to list only lower triangular coefficients.
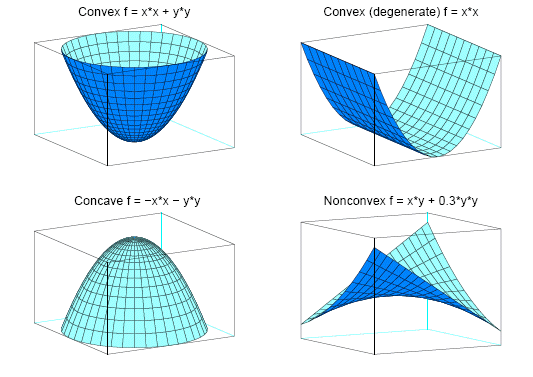
In addition to being symmetric, is also required to be positive semidefinite,
![\[ \mathbf{x}^\textrm {T}\mathbf{Qx} \ge 0,\quad \forall \mathbf{x}\in \mathbb {R}^ n \]](images/ormpug_optqp0018.png)
for minimization type of models; it is required to be negative semidefinite for the maximization type of models. Convexity can come as a result of a matrix-matrix multiplication
![\[ \mathbf{Q} = \mathbf{L}\mathbf{L}^\textrm {T} \]](images/ormpug_optqp0019.png)
or as a consequence of physical laws, and so on. See Figure 14.1 for examples of convex, concave, and nonconvex objective functions.
Figure 14.1: Examples of Convex, Concave, and Nonconvex Objective Functions
The order of constraints is insignificant. Some or all components of  or
or  (lower and upper bounds, respectively) can be omitted.
(lower and upper bounds, respectively) can be omitted.