The OPTNET Procedure
- Overview
-
Getting Started

-
SyntaxFunctional SummaryPROC OPTNET StatementBICONCOMP StatementCLIQUE StatementCONCOMP StatementCYCLE StatementDATA_ADJ_MATRIX_VAR StatementDATA_LINKS_VAR StatementDATA_MATRIX_VAR StatementDATA_NODES_VAR StatementLINEAR_ASSIGNMENT StatementMINCOSTFLOW StatementMINCUT StatementMINSPANTREE StatementSHORTPATH StatementTRANSITIVE_CLOSURE StatementTSP Statement
-
Details
-
ExamplesArticulation Points in a Terrorist NetworkCycle Detection for Kidney Donor ExchangeLinear Assignment Problem for Minimizing Swim TimesLinear Assignment Problem, Sparse Format versus Dense FormatMinimum Spanning Tree for Computer Network TopologyTransitive Closure for Identification of Circular Dependencies in a Bug Tracking SystemTraveling Salesman Tour through US Capital Cities
- References
A connected component of a graph is a set of nodes that are all reachable from each other. That is, if two nodes are in the same component, then there exists a path between them. For a directed graph, there are two types of components: a strongly connected component has a directed path between any two nodes, and a weakly connected component ignores direction and requires only that a path exists between any two nodes.
In PROC OPTNET, connected components can be invoked by using the CONCOMP statement. The options for this statement are described in the section CONCOMP Statement.
There are two main algorithms for finding connected components on an undirected graph: a depth-first search algorithm (ALGORITHM=DFS)
and a union-find algorithm (ALGORITHM=UNION_FIND). Given a graph ![]() , both algorithms run in time
, both algorithms run in time ![]() and typically can scale to very large graphs. The default, depth-first search, works only with a full graph structure (GRAPH_INTERNAL_FORMAT=FULL)
and for this reason can sometimes be slower than the union-find algorithm. For directed graphs, the only algorithm available
is depth-first search.
and typically can scale to very large graphs. The default, depth-first search, works only with a full graph structure (GRAPH_INTERNAL_FORMAT=FULL)
and for this reason can sometimes be slower than the union-find algorithm. For directed graphs, the only algorithm available
is depth-first search.
The results for the connected components algorithm are written to the output node data set that is specified in the OUT_NODES=
option in the PROC OPTNET statement. For each node in the node data set, the variable concomp identifies its component. The component identifiers are numbered sequentially starting from 1.
The connected components algorithm reports status information in a macro variable called _OROPTNET_CONCOMP_. See the section Macro Variable _OROPTNET_CONCOMP_ for more information about this macro variable.
This section illustrates the use of the connected components algorithm on the simple undirected graph ![]() shown in Figure 2.20.
shown in Figure 2.20.
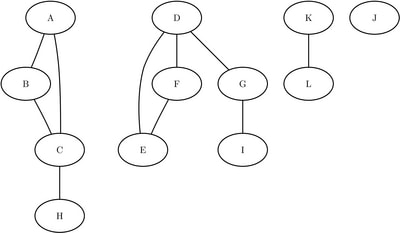
The undirected graph ![]() can be represented by the links data set
can be represented by the links data set LinkSetIn as follows:
data LinkSetIn; input from $ to $ @@; datalines; A B A C B C C H D E D F D G F E G I K L ;
The following statements calculate the connected components and output the results in the data set NodeSetOut:
proc optnet data_links = LinkSetIn out_nodes = NodeSetOut; concomp; run;
The data set NodeSetOut contains the connected components of the input graph and is shown in Figure 2.21.
Figure 2.21: Connected Components of a Simple Undirected Graph
| node | concomp |
|---|---|
| A | 1 |
| B | 1 |
| C | 1 |
| H | 1 |
| D | 2 |
| E | 2 |
| F | 2 |
| G | 2 |
| I | 2 |
| K | 3 |
| L | 3 |
Notice that the graph was defined by using only the links data set. As seen in Figure 2.20, this graph also contains a singleton node labeled J, which has no associated links. By definition, this node defines its
own component. But because the input graph was defined with the links data set alone, it did not show up in the results data
set. To define a graph with nodes that have no associated links, you should also define the input nodes data set. In this
case, define the nodes data set NodeSetIn as follows:
data NodeSetIn; input node $ @@; datalines; A B C D E F G H I J K L ;
Now, when you calculate the connected components, you define the input graph by using both the nodes and links input data sets:
proc optnet data_nodes = NodeSetIn data_links = LinkSetIn out_nodes = NodeSetOut; concomp; run;
The resulting data set NodeSetOut includes the singleton node J as its own component, as shown in Figure 2.22.
Figure 2.22: Connected Components of a Simple Undirected Graph
| node | concomp |
|---|---|
| A | 1 |
| B | 1 |
| C | 1 |
| D | 2 |
| E | 2 |
| F | 2 |
| G | 2 |
| H | 1 |
| I | 2 |
| J | 3 |
| K | 4 |
| L | 4 |
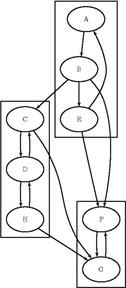
This section illustrates the use of the connected components algorithm on the simple directed graph ![]() shown in Figure 2.23.
shown in Figure 2.23.
The directed graph ![]() can be represented by the links data set
can be represented by the links data set LinkSetIn as follows:
data LinkSetIn; input from $ to $ @@; datalines; A B B C B E B F C G C D D C D H E A E F F G G F H G H D ;
The following statements calculate the connected components and output the results in the data set NodeSetOut:
proc optnet graph_direction = directed data_links = LinkSetIn out_nodes = NodeSetOut; concomp; run;
The data set NodeSetOut, shown in Figure 2.24, now contains the connected components of the input graph.
Figure 2.24: Connected Components of a Simple Directed Graph
| node | concomp |
|---|---|
| A | 3 |
| B | 3 |
| C | 2 |
| E | 3 |
| F | 1 |
| G | 1 |
| D | 2 |
| H | 2 |
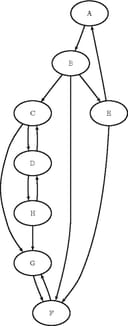
The connected components are represented graphically in Figure 2.25.