| The Sequential Quadratic Programming Solver |
Example 13.4: Using the PENALTY= Option
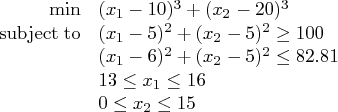
The PENALTY= option plays an important role in ensuring a good convergence rate. Consider the following example:
Assume the starting point ![]() . You can use the following SAS code to solve the problem:
. You can use the following SAS code to solve the problem:
proc optmodel;
var x1 >=13 <=16, x2 >=0 <=15;
minimize obj =
(x1-10)^3 + (x2-20)^3;
con cons1:
(x1-5)^2 + (x2-5)^2 - 100 >= 0;
con cons2:
82.81 - (x1-6)^2 - (x2-5)^2 >= 0;
/* starting point */
x1 = 14.35;
x2 = 8.6;
solve with sqp / printfreq = 5;
print x1 x2;
quit;
The optimal solution is displayed in Output 13.4.1.
Output 13.4.1: Optimal SolutionThe SQP solver might converge to the optimal solution more quickly if you specify PENALTY = 0.1 instead of the default value (0.75). You can specify the PENALTY= option in the SOLVE statement as follows:
proc optmodel;
...
solve with sqp / printfreq=5 penalty=0.1;
...
quit;
The optimal solution is displayed in Output 13.4.2.
Output 13.4.2: Optimal Solution Using the PENALTY= OptionThe OPTMODEL Procedure
The OPTMODEL Procedure
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
The iteration log is shown in Output 13.4.3.
Output 13.4.3: Iteration Log
|
You can see from Output 13.4.2 that the SQP solver took fewer iterations to converge to the optimal solution (see Output 13.4.1).
Copyright © 2008 by SAS Institute Inc., Cary, NC, USA. All rights reserved.