| The OPTQP Procedure |
Overview: OPTQP Procedure
The OPTQP procedure solves quadratic programs - problems with quadratic objective function and a collection of linear constraints, including lower and/or upper bounds on the decision variables.
Mathematically, a quadratic programming (QP) problem can be stated as follows:
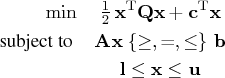
| is the quadratic (also known as Hessian) matrix | ||||
| is the constraints matrix | ||||
| is the vector of decision variables | ||||
| is the vector of linear objective function coefficients | ||||
| is the vector of constraints right-hand sides (RHS) | ||||
| is the vector of lower bounds on the decision variables | ||||
| is the vector of upper bounds on the decision variables |
The quadratic matrix ![]() is assumed to be symmetric; i.e.,
is assumed to be symmetric; i.e.,
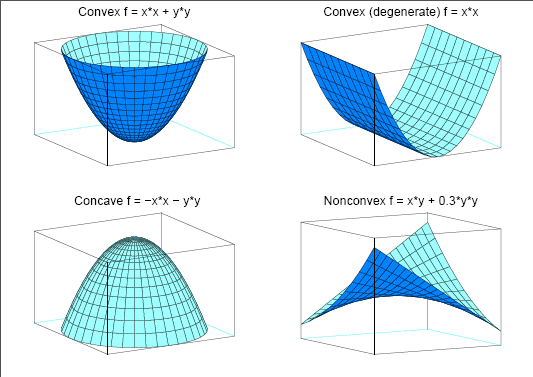
In addition to being symmetric, ![]() is also required to be positive semidefinite:
is also required to be positive semidefinite:
|
Figure 17.1: Examples of Convex, Concave, and Nonconvex Objective Functions
The order of constraints is insignificant. Some or all components of
![]() or
or ![]() (lower/upper bounds) can be omitted.
(lower/upper bounds) can be omitted.
Copyright © 2008 by SAS Institute Inc., Cary, NC, USA. All rights reserved.