| The Interior Point Nonlinear Programming Solver -- Experimental |
Example 7.3: Solving NLP Problems with Range Constraints
Often there are constraints with both lower and upper bounds, i.e., ![]() . These constraints are
called range constraints . The IPNLP solver can handle range constraints in an efficient way. Consider the following NLP
problem:
. These constraints are
called range constraints . The IPNLP solver can handle range constraints in an efficient way. Consider the following NLP
problem:
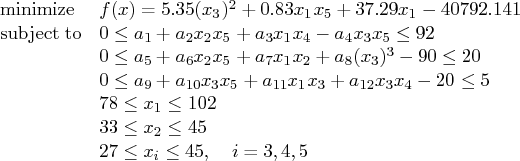
where the values of the parameters ![]() , are shown in Table 7.2.
, are shown in Table 7.2.
|
|
|
|
|
|
|
| 1 | 85.334407 | 5 | 80.51249 | 9 | 0.0047026 |
| 2 | 0.0056858 | 6 | 0.0071317 | 10 | 0.0012547 |
| 3 | 0.0006262 | 7 | 0.0029955 | 11 | 0.0019085 |
| 4 | 0.0022053 | 8 | 0.0021813 | 12 | 0.0019085 |
The initial point used is ![]() . You can call the IPNLP solver within PROC OPTMODEL
to solve this problem by writing the following SAS code:
. You can call the IPNLP solver within PROC OPTMODEL
to solve this problem by writing the following SAS code:
proc optmodel;
number l {1..5} = [78 33 27 27 27];
number u {1..5} = [102 45 45 45 45];
number a {1..12} =
[85.334407 0.0056858 0.0006262 0.0022053
80.51249 0.0071317 0.0029955 0.0021813
9.300961 0.0047026 0.0012547 0.0019085];
var x {j in 1..5} >= l[j] <= u[j];
minimize obj = 5.35*x[3]^2 + 0.83*x[1]*x[5] + 37.29*x[1]
- 40792.141;
con constr1:
0 <= a[1] + a[2]*x[2]*x[5] + a[3]*x[1]*x[4] -
a[4]*x[3]*x[5] <= 92;
con constr2:
0 <= a[5] + a[6]*x[2]*x[5] + a[7]*x[1]*x[2] +
a[8]*x[3]^2 - 90 <= 20;
con constr3:
0 <= a[9] + a[10]*x[3]*x[5] + a[11]*x[1]*x[3] +
a[12]*x[3]*x[4] -20 <= 5;
x[1] = 78;
x[2] = 33;
x[3] = 27;
x[4] = 27;
x[5] = 27;
solve with ipnlp;
print x;
quit;
The summaries and the optimal solution are shown in Output 7.3.1.
Output 7.3.1: Summaries and the Optimal Solution
Copyright © 2008 by SAS Institute Inc., Cary, NC, USA. All rights reserved.