| Nonlinear Optimization Examples |
Finite-Difference Approximations of Derivatives
If the optimization technique needs first- or second-order
derivatives and you do not specify the corresponding
IML module "grd," "hes," "jac," or
"jacnlc," the derivatives are approximated by finite-difference
formulas using only calls of the module "fun."
If the optimization technique needs second-order derivatives and
you specify the "grd" module but not the "hes" module,
the subroutine approximates the second-order derivatives by finite
differences using ![]() or
or ![]() calls of the "grd" module.
calls of the "grd" module.
The eighth element of the opt argument specifies
the type of finite-difference approximation used to
compute first- or second-order derivatives and whether
the finite-difference intervals, ![]() , should be computed
by an algorithm of Gill et al. (1983).
The value of opt[8] is a two-digit integer,
, should be computed
by an algorithm of Gill et al. (1983).
The value of opt[8] is a two-digit integer, ![]() .
.
- If opt[8] is missing or
 , the fast
but not very precise forward-difference formulas
are used; if
, the fast
but not very precise forward-difference formulas
are used; if  , the numerically more
expensive central-difference formulas are used.
, the numerically more
expensive central-difference formulas are used.
- If opt[8] is missing or
 ,
the finite-difference intervals
,
the finite-difference intervals  are based only on the
information of par[8] or par[9], which specifies
the number of accurate digits to use in evaluating the
objective function and nonlinear constraints, respectively.
If
are based only on the
information of par[8] or par[9], which specifies
the number of accurate digits to use in evaluating the
objective function and nonlinear constraints, respectively.
If  , the intervals are computed with
an algorithm by Gill et al. (1983).
For
, the intervals are computed with
an algorithm by Gill et al. (1983).
For  , the interval is based on the behavior of the
objective function; for
, the interval is based on the behavior of the
objective function; for  , the interval is based on the
behavior of the nonlinear constraint functions; and for
, the interval is based on the
behavior of the nonlinear constraint functions; and for
 , the interval is based on the behavior of both the
objective function and the nonlinear constraint functions.
, the interval is based on the behavior of both the
objective function and the nonlinear constraint functions.
Forward-Difference Approximations
- First-order derivatives:
 additional function
calls are needed.
additional function
calls are needed.
- Second-order derivatives based on function calls
only, when the "grd" module is not specified
(Dennis and Schnabel 1983): for a dense Hessian
matrix,
 additional function calls are needed.
additional function calls are needed.
- Second-order derivatives based on gradient calls, when
the "grd" module is specified (Dennis and Schnabel
1983): additional gradient calls are needed.
Central-Difference Approximations
- First-order derivatives:
 additional function calls are needed.
additional function calls are needed.
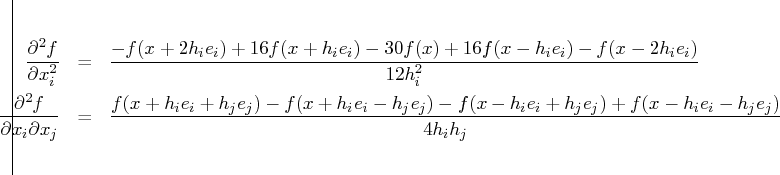
- Second-order derivatives based on function calls
only, when the "grd" module is not specified
(Abramowitz and Stegun 1972): for a dense Hessian
matrix,
 additional function calls are needed.
additional function calls are needed.
- Second-order derivatives based on gradient
calls, when the "grd" module is specified:
additional gradient calls are needed.
- For the forward-difference approximation of
first-order derivatives using only function calls and
for second-order derivatives using only gradient calls,
![h_j = \sqrt[2]{\eta_j} (1 + | x_j|)](images/nonlinearoptexpls_nonlinearoptexplseq96.gif) .
. - For the forward-difference approximation of
second-order derivatives using only function
calls and for central-difference formulas,
![h_j = \sqrt[3]{\eta_j} (1 + | x_j|)](images/nonlinearoptexpls_nonlinearoptexplseq97.gif) .
.
If the algorithm of Gill et al. (1983) is not used to compute
![]() , a constant value
, a constant value
![]() is used depending on the value of par[8].
is used depending on the value of par[8].
- If the number of accurate digits is specified by
par
![[8]=k_1](images/nonlinearoptexpls_nonlinearoptexplseq100.gif) , then
, then  is set to
is set to  .
. - If par[8] is not specified, is
set to the machine precision,
 .
.
- The absolute maximum gradient element is less than or equal to 100 times the ABSGTOL threshold.
- The term on the left of the GTOL criterion
is less than or equal to
 E-6,
E-6,  GTOL threshold
GTOL threshold .
The 1E-6 ensures that the switch is performed
even if you set the GTOL threshold to zero.
.
The 1E-6 ensures that the switch is performed
even if you set the GTOL threshold to zero.
Many applications need considerably more time for computing second-order derivatives than for computing first-order derivatives. In such cases, you should use a quasi-Newton or conjugate gradient technique.
If you specify a vector, ![]() , of
, of ![]() nonlinear constraints
with the "nlc" module but you do not specify the
"jacnlc" module, the first-order formulas can be
used to compute finite-difference approximations of the
nonlinear constraints
with the "nlc" module but you do not specify the
"jacnlc" module, the first-order formulas can be
used to compute finite-difference approximations of the
![]() Jacobian matrix of the nonlinear constraints.
Jacobian matrix of the nonlinear constraints.
Note: If you are not able to specify analytic derivatives and if the finite-difference approximations provided by the subroutines are not good enough to solve your optimization problem, you might be able to implement better finite-difference approximations with the "grd," "hes," "jac," and `` jacnlc'' module arguments.
Copyright © 2009 by SAS Institute Inc., Cary, NC, USA. All rights reserved.