| The Sequential Quadratic Programming Solver |
Conditions of Optimality
To facilitate discussion of the optimality conditions, we present the notation to be used for easy reference:

- number of general nonlinear constraints, which include the linear constraints but not the bound constraints

- dimension of
 , i.e., the number of decision variables
, i.e., the number of decision variables
- iterate, i.e., the vector of decision variables

- objective function

- gradient of the objective function

- Hessian matrix of the objective function

- Lagrange multiplier vector,


- Lagrangian function of constrained problems

- gradient of the Lagrangian function with
respect to
We rewrite the general form of
nonlinear optimization problems in the section "Overview" by grouping the equality
constraints and inequality constraints. We also rewrite all the general nonlinear
inequality constraints and bound constraints in one form as ``![]() '' inequality
constraints. Thus we have the following:
'' inequality
constraints. Thus we have the following:
A point ![]() is feasible if it satisfies all the constraints
is feasible if it satisfies all the constraints ![]() , and
, and ![]() .
The feasible region
.
The feasible region ![]() consists of all the feasible points. In unconstrained
cases, the feasible region
consists of all the feasible points. In unconstrained
cases, the feasible region ![]() is the entire
is the entire ![]() space.
space.
A feasible point ![]() is a local solution of the problem if there exists a
neighborhood
is a local solution of the problem if there exists a
neighborhood ![]() of
of ![]() such that
such that
The SQP solver finds a local minimum of an optimization problem.
Unconstrained Optimization
The following conditions hold for unconstrained optimization problems:- First-order necessary conditions: If
 is a local solution and is
continuously differentiable in some neighborhood of , then
is a local solution and is
continuously differentiable in some neighborhood of , then
- Second-order necessary conditions: If is a local solution and
is twice continuously differentiable in some neighborhood of , then
 is positive semidefinite.
is positive semidefinite.
- Second-order sufficient conditions: If
is twice continuously differentiable in some neighborhood of , and
if
 and is positive definite, then is a
strict local solution.
and is positive definite, then is a
strict local solution.
Constrained Optimization
For constrained optimization problems, the Lagrangian function is defined as follows:We also need the following definition before we can state the first-order and second-order necessary conditions:
- Linear independence constraint qualification and regular point: A point is
said to satisfy the linear independence constraint qualification if the gradients of active constraints
as a regular point .
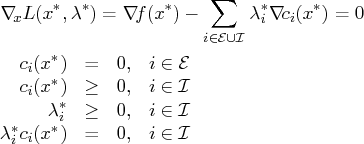
We now state the theorems that are essential in the analysis and design of algorithms for constrained optimization:
- First-order necessary conditions: Suppose is a local minimum and also a regular point. If and
 , are
continuously differentiable, there exist Lagrange multipliers
, are
continuously differentiable, there exist Lagrange multipliers  such that the following conditions hold:
such that the following conditions hold:
- Second-order necessary conditions: Suppose is a local minimum and also a regular point. Let
 be the Lagrange multipliers that
satisfy the KKT conditions. If and , are twice
continuously differentiable, the following conditions hold:
be the Lagrange multipliers that
satisfy the KKT conditions. If and , are twice
continuously differentiable, the following conditions hold:
 that satisfy
that satisfy
- Second-order sufficient conditions: Suppose there exist a point and some
Lagrange multipliers such that the KKT conditions are satisfied. If
the conditions
that satisfy
is a strict local solution.
Note that the set of all such ![]() 's forms the null space of matrix
's forms the null space of matrix
![]() . Hence we can numerically check
the Hessian of the Lagrangian function projected onto the null space. For a rigorous
treatment of the optimality conditions, see Fletcher (1987) and
Nocedal and Wright (1999).
. Hence we can numerically check
the Hessian of the Lagrangian function projected onto the null space. For a rigorous
treatment of the optimality conditions, see Fletcher (1987) and
Nocedal and Wright (1999).
Solver's Criteria
The SQP solver declares a solution to be optimal when all the following criteria are satisfied:- The relative norm of the gradient of the Lagrangian function is less than OPTTOL, and the absolute norm of the gradient of the Lagrangian function is less than 1.0E - 2.
When the problem is a constrained optimization problem, the relative norm of the gradient of the Lagrangian function is defined as
When the problem is an unconstrained optimization problem, it is defined as
- The absolute value of each equality constraint is less than FEASTOL.
- The value of each ``
 '' inequality is greater than the right-hand-side constant minus FEASTOL.
'' inequality is greater than the right-hand-side constant minus FEASTOL.
- The value of each ``
 '' inequality is less than the right-hand-side constant plus FEASTOL.
'' inequality is less than the right-hand-side constant plus FEASTOL.
- The value of each Lagrange multiplier for inequalities is greater than -OPTTOL.
- The minimum of both the values of an inequality and its corresponding Lagrange multiplier is less than OPTTOL.
The last four points imply that the complementarity error, defined as
![]() ,
, ![]() , approaches zero as the solver progresses.
, approaches zero as the solver progresses.
The SQP solver provides the HESCHECK option to verify that the second-order necessary conditions are also satisfied.
Copyright © 2008 by SAS Institute Inc., Cary, NC, USA. All rights reserved.