| The NLPC Nonlinear Optimization Solver |
Overview
In nonlinear optimization, we try to minimize or maximize an objective function that can be subject to a set of constraints. The objective function is typically nonlinear in terms of the decision variables. If the problem is constrained, it can be subject to bound, linear, or nonlinear constraints. In general, we can classify nonlinear optimization (minimization or maximization) problems into the following four categories:
- unconstrained
- bound constrained
- linearly constrained
- nonlinearly constrained
Since a maximization problem is equivalent to minimizing the negative of the same objective function, the general form of nonlinear optimization problems can, without loss of generality, be mathematically described as follows:
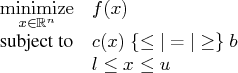
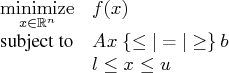
These different problem classes typically call for different types of algorithms to solve them. The algorithm(s) devised specifically to solve a particular class of problem might not be suitable for solving problems in a different class. For instance, there are algorithms that specifically solve unconstrained and bound constrained problems. For linearly constrained problems, the fact that the Jacobian of the constraints is constant enables us to design algorithms that are more efficient for that class.
Optimization Techniques and Types of Problems Solved
Copyright © 2008 by SAS Institute Inc., Cary, NC, USA. All rights reserved.