Example 7.7 Simple Pooling Problem
The following optimization problem is discussed in Haverly (1978) and in Liebman et al. (1986, pp. 127–128). Two liquid chemicals,  and
and  , are produced by the pooling and blending of three input liquid chemicals,
, are produced by the pooling and blending of three input liquid chemicals,  ,
,  , and
, and  . You know the sulfur impurity amounts of the input chemicals, and you have to respect upper limits of the sulfur impurity amounts of the output chemicals. The sulfur concentrations and the prices of the input and output chemicals are:
. You know the sulfur impurity amounts of the input chemicals, and you have to respect upper limits of the sulfur impurity amounts of the output chemicals. The sulfur concentrations and the prices of the input and output chemicals are:
Chemical
: Concentration = 3%, Price= $6 Chemical
: Concentration = 1%, Price= $16 Chemical
: Concentration = 2%, Price= $10 Chemical
: Concentration  2.5%, Price= $9
2.5%, Price= $9 Chemical
: Concentration 1.5%, Price= $15
The problem is complicated by the fact that the two input chemicals and are available only as a mixture (they are either shipped together or stored together). Because the amounts of and are unknown, the sulfur concentration of the mixture is also unknown.
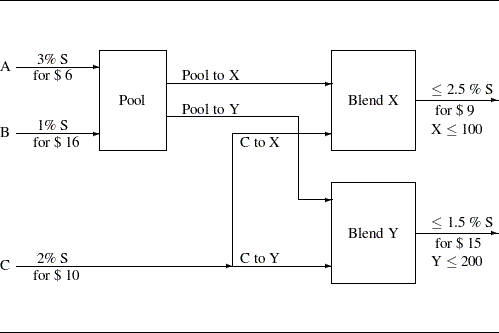
You know customers will buy no more than 100 units of X and 200 units of Y. The problem is determining how to operate the pooling and blending of the chemicals to maximize the profit. The objective function for the profit is
 |
 |
 |
|||
 |
 |
 |
There are three groups of constraints:
-
The first group of constraint functions is the mass balance restrictions illustrated by the graph. These are four linear equality constraints:
-
You introduce a new variable,
 , that represents the sulfur concentration of the pool. Using and the sulfur concentration of (2%), you obtain two nonlinear inequality constraints for the sulfur concentrations of and , one linear equality constraint for the sulfur balance, and lower and upper boundary restrictions for :
, that represents the sulfur concentration of the pool. Using and the sulfur concentration of (2%), you obtain two nonlinear inequality constraints for the sulfur concentrations of and , one linear equality constraint for the sulfur balance, and lower and upper boundary restrictions for : -
The last group assembles the remaining boundary constraints. First, you do not want to produce more than you can sell; and finally, all variables must be nonnegative:











There exist several local optima to this problem that can be found by specifying different starting points. Using the starting point with all variables equal to 1 (specified with a PARMS statement), PROC NLP finds a solution with  :
:
/* PROC NLP Example 7: Simple Pooling Problem */
/****************************************************************/
proc nlp all;
parms amountx amounty amounta amountb amountc
pooltox pooltoy ctox ctoy pools = 1;
bounds 0 <= amountx amounty amounta amountb amountc,
amountx <= 100,
amounty <= 200,
0 <= pooltox pooltoy ctox ctoy,
1 <= pools <= 3;
lincon amounta + amountb = pooltox + pooltoy,
pooltox + ctox = amountx,
pooltoy + ctoy = amounty,
ctox + ctoy = amountc;
nlincon nlc1-nlc2 >= 0.,
nlc3 = 0.;
max f;
costa = 6; costb = 16; costc = 10;
costx = 9; costy = 15;
f = costx * amountx + costy * amounty
- costa * amounta - costb * amountb - costc * amountc;
nlc1 = 2.5 * amountx - pools * pooltox - 2. * ctox;
nlc2 = 1.5 * amounty - pools * pooltoy - 2. * ctoy;
nlc3 = 3 * amounta + amountb - pools * (amounta + amountb);
run;
The specified starting point was not feasible with respect to the linear equality constraints; therefore, a starting point is generated that satisfies linear and boundary constraints. Output 7.7.1 gives the starting parameter estimates.
| Optimization Start | ||||||
|---|---|---|---|---|---|---|
| Parameter Estimates | ||||||
| N | Parameter | Estimate | Gradient Objective Function |
Gradient Lagrange Function |
Lower Bound Constraint |
Upper Bound Constraint |
| 1 | amountx | 1.363636 | 9.000000 | -0.843698 | 0 | 100.000000 |
| 2 | amounty | 1.363636 | 15.000000 | -0.111882 | 0 | 200.000000 |
| 3 | amounta | 0.818182 | -6.000000 | -0.430733 | 0 | . |
| 4 | amountb | 0.818182 | -16.000000 | -0.542615 | 0 | . |
| 5 | amountc | 1.090909 | -10.000000 | 0.017768 | 0 | . |
| 6 | pooltox | 0.818182 | 0 | -0.669628 | 0 | . |
| 7 | pooltoy | 0.818182 | 0 | -0.303720 | 0 | . |
| 8 | ctox | 0.545455 | 0 | -0.174070 | 0 | . |
| 9 | ctoy | 0.545455 | 0 | 0.191838 | 0 | . |
| 10 | pools | 2.000000 | 0 | 0.068372 | 1.000000 | 3.000000 |
| Optimization Results | ||||||
|---|---|---|---|---|---|---|
| Parameter Estimates | ||||||
| N | Parameter | Estimate | Gradient Objective Function |
Gradient Lagrange Function |
Active Bound Constraint |
|
| 1 | amountx | -1.40474E-11 | 9.000000 | 0 | Lower BC | |
| 2 | amounty | 200.000000 | 15.000000 | 0 | Upper BC | |
| 3 | amounta | 1.027701E-16 | -6.000000 | 0 | Lower BC | |
| 4 | amountb | 100.000000 | -16.000000 | -1.77636E-15 | ||
| 5 | amountc | 100.000000 | -10.000000 | 1.776357E-15 | ||
| 6 | pooltox | 7.024003E-12 | 0 | 0 | Lower BC | |
| 7 | pooltoy | 100.000000 | 0 | -1.06581E-14 | ||
| 8 | ctox | -2.10714E-11 | 0 | 5.329071E-15 | Lower BC | LinDep |
| 9 | ctoy | 100.000000 | 0 | 1.776357E-15 | ||
| 10 | pools | 1.000000 | 0 | 0 | Lower BC | LinDep |
The starting point satisfies the four equality constraints, as shown in Output 7.7.2. The nonlinear constraints are given in Output 7.7.3.
| Linear Constraints | |||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | -3.331E-16 | : | ACT | 0 | == | + | 1.0000 | * | amounta | + | 1.0000 | * | amountb | - | 1.0000 | * | pooltox | - | 1.0000 | * | pooltoy |
| 2 | 1.1102E-16 | : | ACT | 0 | == | - | 1.0000 | * | amountx | + | 1.0000 | * | pooltox | + | 1.0000 | * | ctox | ||||
| 3 | 1.1102E-16 | : | ACT | 0 | == | - | 1.0000 | * | amounty | + | 1.0000 | * | pooltoy | + | 1.0000 | * | ctoy | ||||
| 4 | 1.1102E-16 | : | ACT | 0 | == | - | 1.0000 | * | amountc | + | 1.0000 | * | ctox | + | 1.0000 | * | ctoy | ||||
| Values of Nonlinear Constraints | ||||||||
|---|---|---|---|---|---|---|---|---|
| Constraint | Value | Residual | Lagrange Multiplier |
|||||
| [ | 5 | ] | nlc3 | 0 | 0 | 4.9441 | Active NLEC | |
| [ | 6 | ] | nlc1_G | 0.6818 | 0.6818 | . | ||
| [ | 7 | ] | nlc2_G | -0.6818 | -0.6818 | -9.8046 | Violat. NLIC | |
| Values of Nonlinear Constraints | ||||||||
|---|---|---|---|---|---|---|---|---|
| Constraint | Value | Residual | Lagrange Multiplier |
|||||
| [ | 5 | ] | nlc3 | 0 | 0 | 6.0000 | Active NLEC | |
| [ | 6 | ] | nlc1_G | 4.04E-16 | 4.04E-16 | . | Active NLIC | LinDep |
| [ | 7 | ] | nlc2_G | -284E-16 | -284E-16 | -6.0000 | Active NLIC | |
Output 7.7.4 shows the settings of some important PROC NLP options.
| Minimum Iterations | 0 |
|---|---|
| Maximum Iterations | 200 |
| Maximum Function Calls | 500 |
| Iterations Reducing Constraint Violation | 20 |
| ABSGCONV Gradient Criterion | 0.00001 |
| GCONV Gradient Criterion | 1E-8 |
| ABSFCONV Function Criterion | 0 |
| FCONV Function Criterion | 2.220446E-16 |
| FCONV2 Function Criterion | 1E-6 |
| FSIZE Parameter | 0 |
| ABSXCONV Parameter Change Criterion | 0 |
| XCONV Parameter Change Criterion | 0 |
| XSIZE Parameter | 0 |
| ABSCONV Function Criterion | 1.340781E154 |
| Line Search Method | 2 |
| Starting Alpha for Line Search | 1 |
| Line Search Precision LSPRECISION | 0.4 |
| DAMPSTEP Parameter for Line Search | . |
| FD Derivatives: Accurate Digits in Obj.F | 15.653559775 |
| FD Derivatives: Accurate Digits in NLCon | 15.653559775 |
| Singularity Tolerance (SINGULAR) | 1E-8 |
| Constraint Precision (LCEPS) | 1E-8 |
| Linearly Dependent Constraints (LCSING) | 1E-8 |
| Releasing Active Constraints (LCDEACT) | . |
The iteration history, given in Output 7.7.5, does not show any problems.
| Iteration | Restarts | Function Calls |
Objective Function |
Maximum Constraint Violation |
Predicted Function Reduction |
Step Size |
Maximum Gradient Element of the Lagrange Function |
|
|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 19 | -1.42400 | 0.00962 | 6.9131 | 1.000 | 0.783 | |
| 2 | ' | 0 | 20 | 2.77026 | 0.0166 | 5.3770 | 1.000 | 2.629 |
| 3 | 0 | 21 | 7.08706 | 0.1409 | 7.1965 | 1.000 | 9.452 | |
| 4 | ' | 0 | 22 | 11.41264 | 0.0583 | 15.5769 | 1.000 | 23.390 |
| 5 | ' | 0 | 23 | 24.84613 | 8.88E-16 | 496.1 | 1.000 | 147.6 |
| 6 | 0 | 24 | 378.22825 | 147.4 | 3316.7 | 1.000 | 840.4 | |
| 7 | ' | 0 | 25 | 307.56810 | 50.9339 | 607.9 | 1.000 | 27.143 |
| 8 | ' | 0 | 26 | 347.24468 | 1.8329 | 21.9883 | 1.000 | 28.482 |
| 9 | ' | 0 | 27 | 349.49255 | 0.00915 | 7.1833 | 1.000 | 28.289 |
| 10 | ' | 0 | 28 | 356.58341 | 0.1083 | 50.2566 | 1.000 | 27.479 |
| 11 | ' | 0 | 29 | 388.70731 | 2.4280 | 24.7996 | 1.000 | 21.114 |
| 12 | ' | 0 | 30 | 389.30118 | 0.0157 | 10.0475 | 1.000 | 18.647 |
| 13 | ' | 0 | 31 | 399.19240 | 0.7997 | 11.1862 | 1.000 | 0.416 |
| 14 | ' | 0 | 32 | 400.00000 | 0.0128 | 0.1533 | 1.000 | 0.00087 |
| 15 | ' | 0 | 33 | 400.00000 | 7.38E-11 | 2.44E-10 | 1.000 | 365E-12 |
| Optimization Results | |||
|---|---|---|---|
| Iterations | 15 | Function Calls | 34 |
| Gradient Calls | 18 | Active Constraints | 10 |
| Objective Function | 400 | Maximum Constraint Violation | 7.381118E-11 |
| Maximum Projected Gradient | 0 | Value Lagrange Function | -400 |
| Maximum Gradient of the Lagran Func | 1.065814E-14 | Slope of Search Direction | -2.43574E-10 |
| FCONV2 convergence criterion satisfied. |
The optimal solution in Output 7.7.6 shows that to obtain the maximum profit of $400, you need only to produce the maximum 200 units of blending and no units of blending .
| Optimization Results | ||||||
|---|---|---|---|---|---|---|
| Parameter Estimates | ||||||
| N | Parameter | Estimate | Gradient Objective Function |
Gradient Lagrange Function |
Active Bound Constraint |
|
| 1 | amountx | -1.40474E-11 | 9.000000 | 0 | Lower BC | |
| 2 | amounty | 200.000000 | 15.000000 | 0 | Upper BC | |
| 3 | amounta | 1.027701E-16 | -6.000000 | 0 | Lower BC | |
| 4 | amountb | 100.000000 | -16.000000 | -1.77636E-15 | ||
| 5 | amountc | 100.000000 | -10.000000 | 1.776357E-15 | ||
| 6 | pooltox | 7.024003E-12 | 0 | 0 | Lower BC | |
| 7 | pooltoy | 100.000000 | 0 | -1.06581E-14 | ||
| 8 | ctox | -2.10714E-11 | 0 | 5.329071E-15 | Lower BC | LinDep |
| 9 | ctoy | 100.000000 | 0 | 1.776357E-15 | ||
| 10 | pools | 1.000000 | 0 | 0 | Lower BC | LinDep |
The constraints are satisfied at the solution, as shown in Output 7.7.7
| Linear Constraints Evaluated at Solution | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | ACT | 0 | = | 0 | + | 1.0000 | * | amounta | + | 1.0000 | * | amountb | - | 1.0000 | * | pooltox | - | 1.0000 | * | pooltoy |
| 2 | ACT | -4.481E-17 | = | 0 | - | 1.0000 | * | amountx | + | 1.0000 | * | pooltox | + | 1.0000 | * | ctox | ||||
| 3 | ACT | 0 | = | 0 | - | 1.0000 | * | amounty | + | 1.0000 | * | pooltoy | + | 1.0000 | * | ctoy | ||||
| 4 | ACT | 0 | = | 0 | - | 1.0000 | * | amountc | + | 1.0000 | * | ctox | + | 1.0000 | * | ctoy | ||||
| Values of Nonlinear Constraints | ||||||||
|---|---|---|---|---|---|---|---|---|
| Constraint | Value | Residual | Lagrange Multiplier |
|||||
| [ | 5 | ] | nlc3 | 0 | 0 | 6.0000 | Active NLEC | |
| [ | 6 | ] | nlc1_G | 4.04E-16 | 4.04E-16 | . | Active NLIC | LinDep |
| [ | 7 | ] | nlc2_G | -284E-16 | -284E-16 | -6.0000 | Active NLIC | |
| Linearly Dependent Active Boundary Constraints |
||
|---|---|---|
| Parameter | N | Kind |
| ctox | 8 | Lower BC |
| pools | 10 | Lower BC |
| Linearly Dependent Gradients of Active Nonlinear Constraints |
|
|---|---|
| Parameter | N |
| nlc3 | 6 |
The same problem can be specified in many different ways. For example, the following specification uses an INEST= data set containing the values of the starting point and of the constants COST, COSTB, COSTC, COSTX, COSTY, CA, CB, CC, and CD:
data init1(type=est);
input _type_ $ amountx amounty amounta amountb
amountc pooltox pooltoy ctox ctoy pools
_rhs_ costa costb costc costx costy
ca cb cc cd;
datalines;
parms 1 1 1 1 1 1 1 1 1 1
. 6 16 10 9 15 2.5 1.5 2. 3.
;
proc nlp inest=init1 all;
parms amountx amounty amounta amountb amountc
pooltox pooltoy ctox ctoy pools;
bounds 0 <= amountx amounty amounta amountb amountc,
amountx <= 100,
amounty <= 200,
0 <= pooltox pooltoy ctox ctoy,
1 <= pools <= 3;
lincon amounta + amountb = pooltox + pooltoy,
pooltox + ctox = amountx,
pooltoy + ctoy = amounty,
ctox + ctoy = amountc;
nlincon nlc1-nlc2 >= 0.,
nlc3 = 0.;
max f;
f = costx * amountx + costy * amounty
- costa * amounta - costb * amountb - costc * amountc;
nlc1 = ca * amountx - pools * pooltox - cc * ctox;
nlc2 = cb * amounty - pools * pooltoy - cc * ctoy;
nlc3 = cd * amounta + amountb - pools * (amounta + amountb);
run;
The third specification uses an INEST= data set containing the boundary and linear constraints in addition to the values of the starting point and of the constants. This specification also writes the model specification into an OUTMOD= data set:
data init2(type=est);
input _type_ $ amountx amounty amounta amountb amountc
pooltox pooltoy ctox ctoy pools
_rhs_ costa costb costc costx costy;
datalines;
parms 1 1 1 1 1 1 1 1 1 1
. 6 16 10 9 15 2.5 1.5 2 3
lowerbd 0 0 0 0 0 0 0 0 0 1
. . . . . . . . . .
upperbd 100 200 . . . . . . . 3
. . . . . . . . . .
eq . . 1 1 . -1 -1 . . .
0 . . . . . . . . .
eq 1 . . . . -1 . -1 . .
0 . . . . . . . . .
eq . 1 . . . . -1 . -1 .
0 . . . . . . . . .
eq . . . . 1 . . -1 -1 .
0 . . . . . . . . .
;
proc nlp inest=init2 outmod=model all;
parms amountx amounty amounta amountb amountc
pooltox pooltoy ctox ctoy pools;
nlincon nlc1-nlc2 >= 0.,
nlc3 = 0.;
max f;
f = costx * amountx + costy * amounty
- costa * amounta - costb * amountb - costc * amountc;
nlc1 = 2.5 * amountx - pools * pooltox - 2. * ctox;
nlc2 = 1.5 * amounty - pools * pooltoy - 2. * ctoy;
nlc3 = 3 * amounta + amountb - pools * (amounta + amountb);
run;
The fourth specification not only reads the INEST=INIT2 data set, it also uses the model specification from the MODEL data set that was generated in the last specification. The PROC NLP call now contains only the defining variable statements:
proc nlp inest=init2 model=model all;
parms amountx amounty amounta amountb amountc
pooltox pooltoy ctox ctoy pools;
nlincon nlc1-nlc2 >= 0.,
nlc3 = 0.;
max f;
run;
All four specifications start with the same starting point of all variables equal to 1 and generate the same results. However, there exist several local optima to this problem, as is pointed out in Liebman et al. (1986, p. 130).
proc nlp inest=init2 model=model all;
parms amountx amounty amounta amountb amountc
pooltox pooltoy ctox ctoy = 0,
pools = 2;
nlincon nlc1-nlc2 >= 0.,
nlc3 = 0.;
max f;
run;
This starting point with all variables equal to 0 is accepted as a local solution with  , which minimizes rather than maximizes the profit.
, which minimizes rather than maximizes the profit.