Differences among Predictive Modeling Nodes
The Regression node,
the Tree node, and the Neural Network node can all learn complex models
from data, but they have different ways of representing complexity
in their models. Choosing a model of appropriate complexity is important
for making accurate predictions, as discussed in the section below
on Generalization. Simple
models are best for learning simple functions of the data (as long
as the model is correct, of course), while complex models are required
for learning complex functions. With all data mining models, one way
to increase the complexity of a model is to add input variables. Other
ways to increase complexity depend on the type of model:
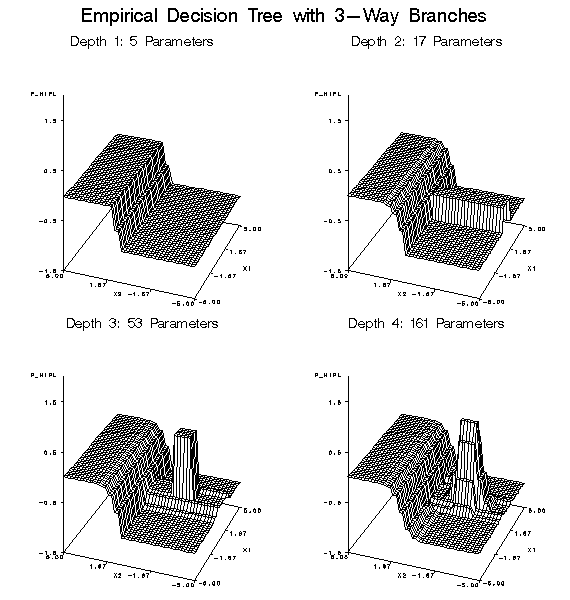
One fundamental difference
between tree-based models and both regression and neural net models
is that tree-based models learn step functions, whereas the other
models learn continuous functions. If you expect the function to be
discontinuous, a tree-based model is a good way to start. However,
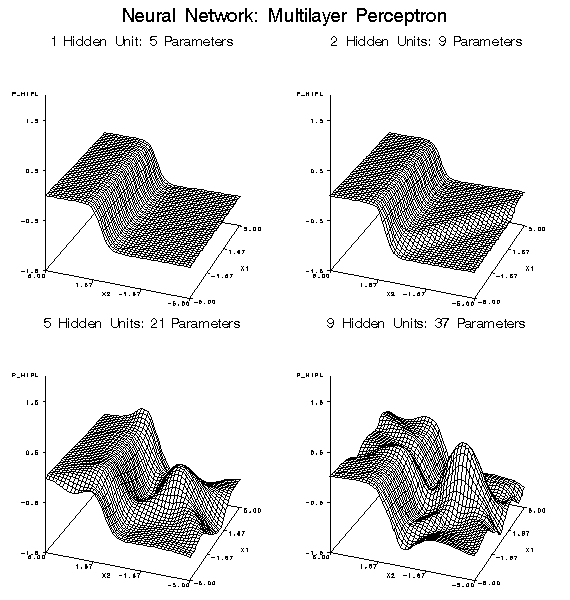
given enough data and training time, neural networks can approximate
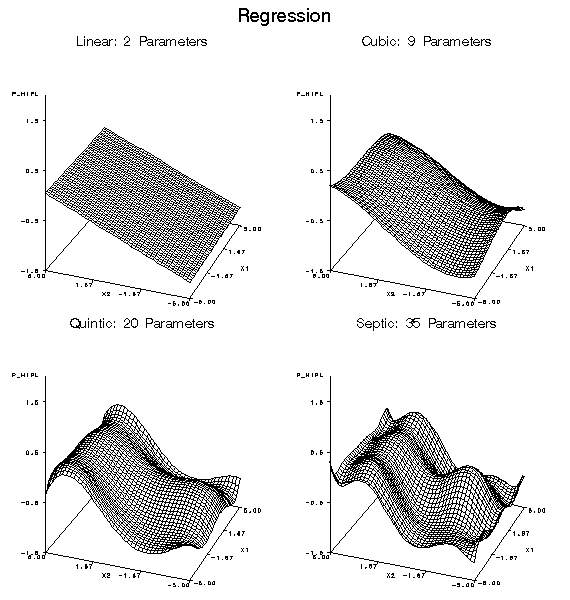
discontinuities arbitrarily well. Polynomial regression models are
not good at learning discontinuities. To model discontinuities using
regression, you need to know where the discontinuities occur and construct
dummy variables to indicate the discontinuities before fitting the
regression model.
For both regression
and neural networks, the simplest models are linear functions of the
inputs. Hence regression and neural nets are both good for learning
linear functions. Tree-based models require many branches to approximate
linear functions accurately.
When there are many
inputs, learning is inherently difficult because of the curse of dimensionality
(see the Neural Network FAQ at
ftp://ftp.sas.com/pub/neural/FAQ2.html#A_curse.
To learn general nonlinear
functions, all modeling methods require a degree of complexity that
grows exponentially with the number of inputs. That is, as the number
of inputs increases, the number of interactions and polynomial terms
required in a regression model grows exponentially, the number of
hidden units required in a neural network grows exponentially, and
the number of branches required in a tree grows exponentially. The
amount of data and the amount of training time required to learn such
models also grow exponentially.
Fortunately, in most
practical applications with a large number of inputs, most of the
inputs are irrelevant or redundant, and the curse of dimensionality
can be circumvented. Tree-based models are especially good at ignoring
irrelevant inputs, since trees often use a relatively small number
of inputs even when the total number of inputs is large.
If the function to be
learned is linear, stepwise regression is good for choosing a small
number out of a large set of inputs. For nonlinear models with many
inputs, regression is not a good choice unless you have prior knowledge
of which interactions and polynomial terms to include in the model.
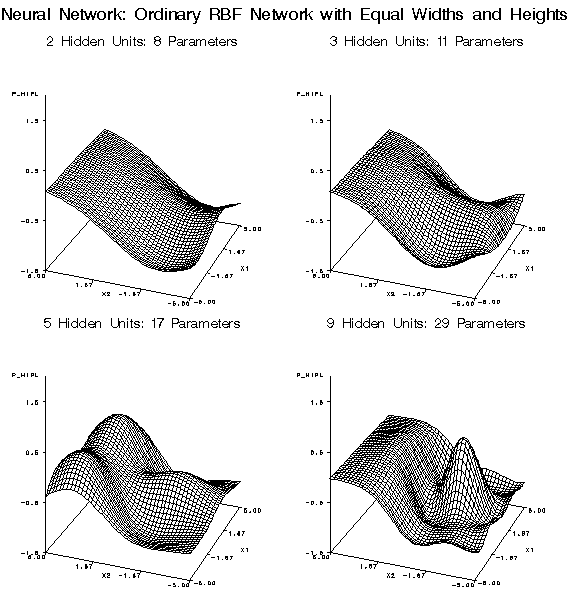
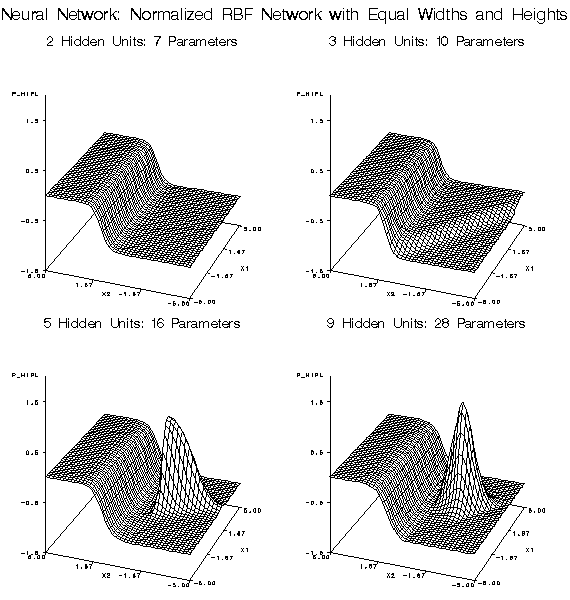
Among various neural net architectures, multilayer perceptrons and
normalized radial basis function (RBF) networks are good at ignoring
irrelevant inputs and finding relevant subspaces of the input space,
but ordinary radial basis function networks should be used only when
all or most of the inputs are relevant.
All of the modeling
nodes can process redundant inputs effectively. Adding redundant inputs
has little effect on the effective dimensionality of the data. Hence
the curse of dimensionality does not apply. When there are redundant
inputs, the training cases lie close to some (possibly nonlinear)
subspace. If this subspace is linear, redundancy is called multicollinearity.
In statistical theory,
it is well-known that redundancy causes parameter estimates (weights)
to be unstable. That is, different parameter estimates can produce
similar predictions. But if the purpose of the analysis is prediction,
unstable parameter estimates are not necessarily a problem. If the
same redundancy applies to the test cases as to the training cases,
the model needs to produce accurate outputs only near the subspace
occupied by the data, and stable parameter estimates are not needed
for accurate prediction. However, if the test cases do not follow
the same pattern of redundancy as the training cases, generalization
will require extrapolation and will rarely work well.
If extrapolation is
required, decision tree-based models are safest, because trees choose
just one of several redundant inputs and produce constant predictions
outside the range of the training data. Stepwise linear regression
or linear-logistic regression are the next safest methods for extrapolation
if a large singularity criterion is used to make sure that the parameter
estimates do not become excessively unstable. Polynomial regression
is usually a bad choice for extrapolation, because the predictions
will often increase or decrease rapidly outside the range of the training
data. Neural networks are also dangerous for extrapolation if the
weights are large. Weight decay and early stopping can be used to
discourage large weights. Normalized radial basis function (RBF) networks
are the safest type of neural net architecture for extrapolation,
since the range of predictions will never exceed the range of the
hidden-to-output weights.
The Decision Tree node
can use cases with missing inputs for training and provides several
ways of making predictions from cases with missing inputs. The Regression
and Neural Network nodes cannot use cases with missing inputs for
training; predictions are based on the unconditional mean or prior
probabilities. (See Predicted Values and Posterior
Probabilities.)
The Neural Network node
can model two or more target variables in the same network. Having
multiple targets in the network can be an advantage when there are
features common to all the targets. Otherwise, it is more efficient
to train separate networks. The Regression node and the Decision Tree
node process only one target at a time, but the Start Group node can
be used to handle multiple targets.
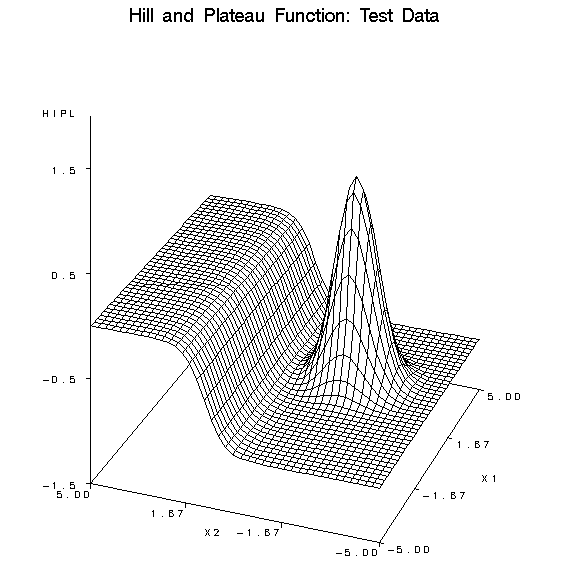
The following figures
illustrate the types of approximation error that commonly occur with
each of the modeling nodes. The noise-free data come from the hill-and-plateau
function, which was chosen because it is difficult for typical neural
networks to learn. Given sufficient model complexity, all of the modeling
nodes can, of course, learn the data accurately. These examples show
what happens with insufficient model complexity. The cases in the
training set lie on a 21 by 21 grid, while those in the test set are
on a 41 by 41 grid.