| The Quadratic Programming Solver |
| Interior Point Algorithm: Overview |
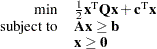
The QP solver implements an infeasible primal-dual predictor-corrector interior point algorithm. To illustrate the algorithm and the concepts of duality and dual infeasibility, consider the following QP formulation (the primal):
 |
The corresponding dual is as follows:
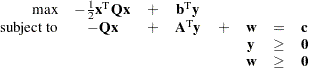 |
where  refers to the vector of dual variables and
refers to the vector of dual variables and  refers to the vector of dual slack variables.
refers to the vector of dual slack variables.
The dual makes an important contribution to the certificate of optimality for the primal. The primal and dual constraints combined with complementarity conditions define the first-order optimality conditions, also known as KKT (Karush-Kuhn-Tucker) conditions, which can be stated as follows:
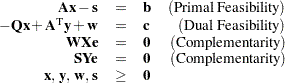 |
where  of appropriate dimension and
of appropriate dimension and  is the vector of primal slack variables.
is the vector of primal slack variables.
Note:Slack variables (the  vector) are automatically introduced by the solver when necessary; it is therefore recommended that you not introduce any slack variables explicitly. This enables the solver to handle slack variables much more efficiently.
vector) are automatically introduced by the solver when necessary; it is therefore recommended that you not introduce any slack variables explicitly. This enables the solver to handle slack variables much more efficiently.
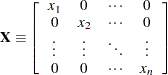
The letters 

 and
and  denote matrices with corresponding
denote matrices with corresponding 

 and on the main diagonal and zero elsewhere, as in the following example:
and on the main diagonal and zero elsewhere, as in the following example:
 |
If  is a solution of the previously defined system of equations representing the KKT conditions, then
is a solution of the previously defined system of equations representing the KKT conditions, then  is also an optimal solution to the original QP model.
is also an optimal solution to the original QP model.
At each iteration the interior point algorithm solves a large, sparse system of linear equations as follows:
 |
where  and
and  denote the vector of search directions in the primal and dual spaces, respectively;
denote the vector of search directions in the primal and dual spaces, respectively;  and
and  constitute the vector of the right-hand sides.
constitute the vector of the right-hand sides.
The preceding system is known as the reduced KKT system. The QP solver uses a preconditioned quasi-minimum residual algorithm to solve this system of equations efficiently.
An important feature of the interior point algorithm is that it takes full advantage of the sparsity in the constraint and quadratic matrices, thereby enabling it to efficiently solve large-scale quadratic programs.
The interior point algorithm works simultaneously in the primal and dual spaces. It attains optimality when both primal and dual feasibility are achieved and when complementarity conditions hold. Therefore it is of interest to observe the following four measures:
Relative primal infeasibility measure
 :
: 
Relative dual infeasibility measure
 :
: 
Relative duality gap
 :
: 
Absolute complementarity
 :
: 
where  is the Euclidean norm of the vector
is the Euclidean norm of the vector  . These measures are displayed in the iteration log.
. These measures are displayed in the iteration log.
Note: This procedure is experimental.
Copyright © SAS Institute, Inc. All Rights Reserved.